
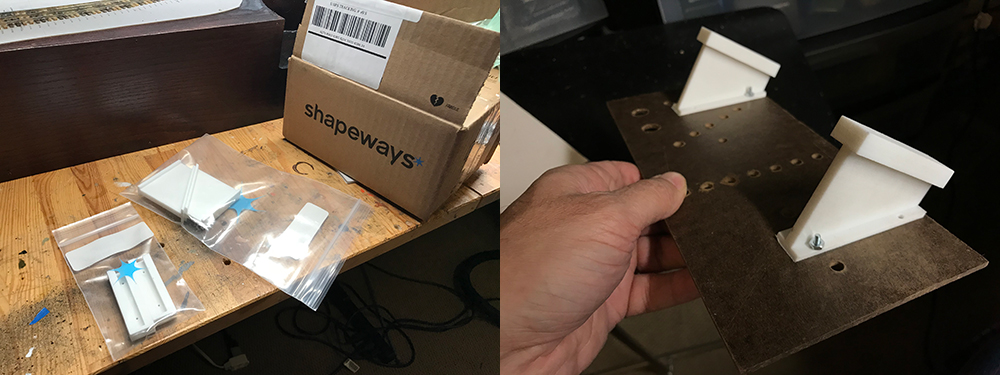
My brackets arrived from Shapeways and I waited no time to fit them. They are made of very tough plastic that called strong white and flexible. From the Shapeways site:
This material is incredibly versatile, and can be used for a wide variety of applications, from iPhone cases to jewelry, remote controlled quadcopters to wearable bikinis. When thin, it’s flexible enough for hinges and springs. When thick, it’s strong enough for structural components.
There was no doubt that the brackets were going to do a good job. My task was to sand them down so that the controller attachment slid nicely and easily into the board attachment.






DC Wiring
Withe controller now correctly positioned it was time to start the hard part: the DC wiring system. The key to this part of the project is simply take your time and work on one section at time without thinking too far ahead. For example if I gave any thought to the frog issues of the turnouts and the crossover I started to panic. I kept things simple and just focused on the first section.
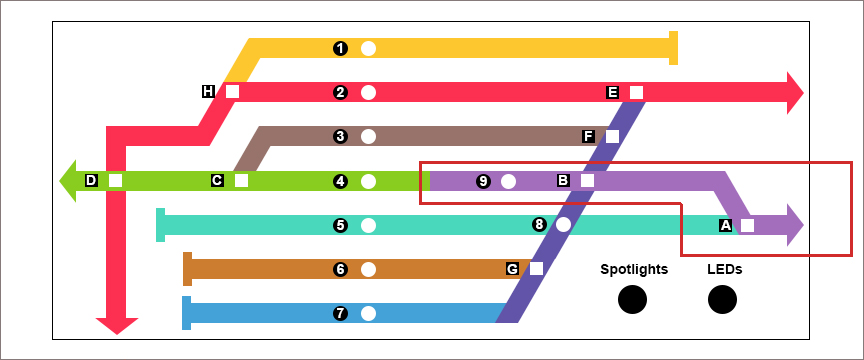
The first section is the entry-point on the right. The goal here is to:
- Relay the track where necessary to create distinct sections.
- Isolate all the rails and test for shorts.
- Get the straights running first and connected to SPST switches to turn power on and off.
- Get the turnout motors fitted, connected to the DPDT switches, get the frogs polarity switching working and test and move on.
This is the process for each of the sections. The most challenging parts will be the crossovers so once this first section is completed I will get started on those immediately after.



